
一、什么是具身智能?机器人“长身体”意味着什么
在说具身智能之前,我们先聊聊它的“前辈”——大语言模型。
以GPT系列为代表的语言模型,本质上是一个“数字大脑”。它们能处理文字、理解语义、生成内容,但这些能力都停留在虚拟世界。你让AI写一篇论文,它可以;你让它去厨房给你倒杯水,它就傻眼了。
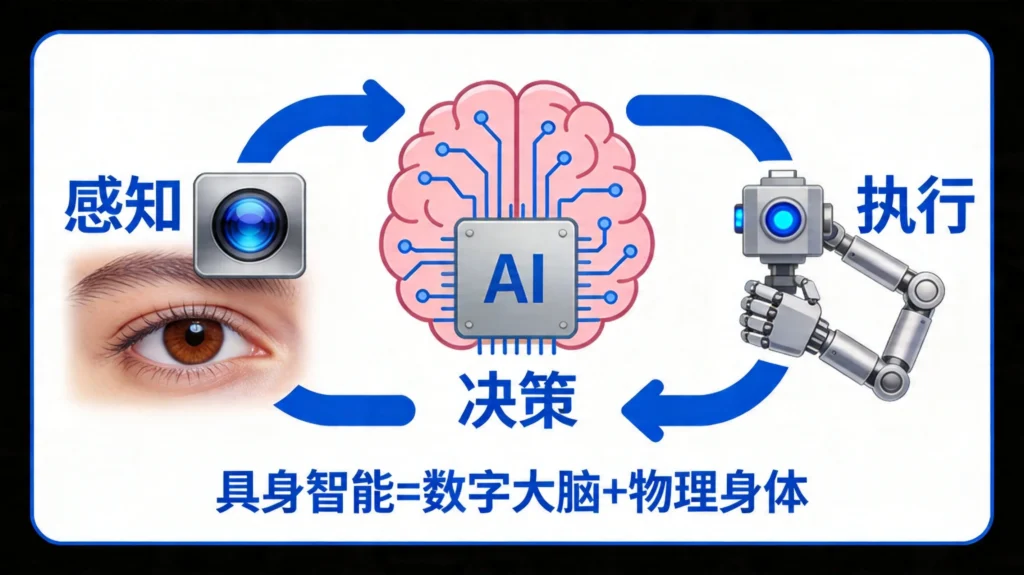
具身智能(Embodied AI),就是要给这个“数字大脑”装上一个“物理身体”,让它不仅能思考,还能感知环境、执行动作。这意味着机器人要同时具备三种能力:
- 感知能力:通过摄像头、传感器理解周围环境
- 决策能力:基于AI算法规划行动路径
- 执行能力:控制电机、关节完成物理动作
听起来简单,做起来却难如登天。因为现实世界的物理交互远比虚拟世界复杂——地面不平整、障碍物突然出现、关节过热……每一个细节都可能让机器人“翻车”。
二、机器人跑赢人类,这一年的进步到底在哪
让我们把目光拉回2025年的首届人形机器人半马赛。
那场比赛的冠军完赛时间是2小时40分钟,而超过70%的参赛机器人因为关节电机过热、电池热失控等原因未能完赛。用裁判的话说:“很多机器人跑到一半就开始冒烟。”
一年后的今天,“闪电”以50分26秒完赛,故障率大幅降低。这背后是四项关键技术的集体突破:
2.1 散热系统:从风冷到液冷
2025年的大多数机器人采用风冷散热,就像一台普通电脑的风扇。但人形机器人高强度运动时,关节电机产生的热量远超风冷的极限。
“闪电”采用了液冷散热系统,冷却液在关节内部循环,能更高效地带走热量。这项技术在新能源汽车领域已经成熟,移植到机器人上需要解决密封性、可靠性等一系列工程难题。
2.2 材料革命:碳纤维与合金的轻量化
机器人要跑马拉松,重量是致命的敌人。太重则耗电快、关节负担大;太轻则结构强度不够。
今年参赛的机器人大量采用了碳纤维骨架和高强度合金,在保证强度的前提下大幅减轻了重量。以“闪电”为例,其整机重量比上代产品轻了约30%,但结构强度提升了50%。
2.3 核心零部件性能跃升
电机、电池、一体化关节——这是人形机器人的“三大件”。
2026年,国产电机厂商推出了峰值扭矩密度更高的无框力矩电机,能在更小体积内输出更大力量;一体化关节将电机、减速机、驱动器集成在一起,大幅降低了关节的复杂度和故障率。
2.4 电池管理:从“暴力输出”到精准控制
续航是马拉松的关键。2026年的机器人普遍采用了高能量密度固态电池,配合智能电池管理系统(BMS),能根据运动状态动态调整放电功率。
“闪电”配备的电池能量密度达到了500Wh/kg,是2025年产品的近两倍。更重要的是,BMS能预判即将到来的上坡或加速,提前调整功率输出,避免电量“猝死”。
三、冷静一下:机器人真的超越人类了吗?
看到“机器人跑赢人类”的标题,很多人可能已经在想象机器人统治世界的场景了。但稍微冷静一下,我们会发现现实远比标题复杂。
首先,这场比赛的场景相对简单。
北京亦庄的半马赛道经过精心设计,整体较为平直,没有复杂的地形变化。相比之下,人类马拉松比赛会有起伏的路面、拥挤的人群、突发的天气变化——这些都是机器人目前难以应对的。
其次,机器人采用了“流水线式”入场。
为了确保完赛,主办方安排机器人逐一出发,而非像人类赛事那样多选手同时起跑。这也大大降低了碰撞规避的计算压力。
更重要的一点:人类长跑的魅力不只是速度。
人类运动员在比赛中需要自主应对突发状况——鞋带松了、抽筋了、对手变速了——这些都需要复杂的感知、决策和临场应变。摔倒后自主爬起、在人群中穿梭、根据对手节奏调整策略,这些能力当前的人形机器人还远不具备。
有体育评论员打了个比方:“这更像是机器人版的’定向越野’,而非真正意义上的马拉松。”
四、具身智能的商业化:机器人正在进入哪些领域
尽管距离“全能机器人”还很遥远,具身智能的商业化已经悄然提速。2026年,我们能看到以下场景正在变为现实:
4.1 工业制造:产线上的“新同事”
特斯拉的Optimus、比亚迪的人形机器人已经在部分产线上岗。它们主要承担重复性高、劳动强度大的任务,如零部件搬运、货物分拣。
“机器人不会请假、不会罢工、不会抱怨加班”——某大型制造企业负责人如是说。据他透露,一台人形机器人的工作效率约等于1.5个熟练工人,按三班倒计算,每年可替代约4-5名工人的工作量。
4.2 商业服务:从酒店到餐厅
日本、韩国已经出现了大量酒店机器人和餐厅传菜机器人。它们不需要像人类一样上下班,成本也比服务员低。
当然,目前的机器人还只能完成固定路线的任务。面对顾客的随机提问、突发需求,还是得靠人类员工。
4.3 医疗康复:精准与耐心的结合
在康复中心,机器人正在成为理疗师的好帮手。它们能精确控制力度和角度,重复执行数千次训练动作而不疲劳。对于中风患者的康复训练来说,这种“不知疲倦的耐心”尤为珍贵。
4.4 家庭陪伴:最遥远的“最后一公里”
很多人期待机器人能走进家庭,帮忙做家务、照顾老人。但坦率地说,家庭场景的复杂度远超工业环境。
每个家庭的布局不同、物品摆放杂乱、老人小孩的行为不可预测——这些都对机器人的感知和决策能力提出了极高要求。目前进入家庭的,主要是扫地机器人、洗碗机等“单功能”设备,能完成复杂家务的通用人形机器人,还需要至少5-10年的技术积累。
五、技术深度:具身智能的核心技术栈
对于技术从业者来说,理解具身智能需要把握以下核心技术:
5.1 运动控制算法
人形机器人要稳定行走、跑步,需要解决双足平衡问题。这涉及到以下几个关键技术:
- 模型预测控制(MPC):提前预测未来一段时间内的运动状态,提前调整关节力矩
- 全身协调控制(WBC):协调手、腿、躯干的运动,避免动作冲突
- 强化学习(RL):让机器人在仿真环境中学习步态,再迁移到真实硬件
python
# 简化版的步态控制伪代码
class GaitController:
def __init__(self, robot_model):
self.mpc = ModelPredictiveController(horizon=0.1)
self.wbc = WholeBodyController()
self.balance_threshold = 0.05 # 平衡阈值
def compute_joint_torques(self, state, desired_foot_pos):
# 1. 使用MPC预测未来状态
predicted_states = self.mpc.predict(state, desired_foot_pos)
# 2. 计算CoM(质心)位置
com = self.compute_center_of_mass(state)
# 3. 检查平衡状态
if abs(com.x - support_polygon_center.x) > self.balance_threshold:
# 需要调整步态
return self.wbc.balance_recovery(state)
# 4. 正常行走计算
return self.wbc.compute_torques(state, desired_foot_pos)
5.2 环境感知与建图
要让机器人在陌生环境中自主移动,需要解决**同步定位与建图(SLAM)**问题。
2026年的机器人普遍采用了多传感器融合方案:
- 深度相机:获取环境的三维信息
- 激光雷达:精确测量距离,尤其在室外环境
- IMU(惯性测量单元):测量姿态和加速度
- 触觉传感器:感知脚与地面的接触状态
5.3 端侧AI芯片:让机器人“自己思考”
2025年以前,大多数机器人需要依赖云端算力完成AI推理,网络延迟成为瓶颈。2026年,华为昇腾、英伟达Jetson等端侧AI芯片的性能大幅提升,机器人可以在本地完成环境感知、路径规划等核心计算。
以昇腾芯片为例,其昇腾950PR芯片能提供约1.56P的算力,足以支撑实时的人体姿态识别和场景理解。
六、优缺点总结:具身智能的现状与局限
优点
| 优势 | 说明 |
|---|---|
| 不知疲倦 | 可24小时连续工作,适合高强度重复性任务 |
| 精度可控 | 动作精度可达毫米级,不会因疲劳下降 |
| 适应恶劣环境 | 可在高温、低温、有毒有害环境中工作 |
| 可复制性强 | 一套算法可部署到多台机器人 |
缺点
| 局限 | 说明 |
|---|---|
| 成本高昂 | 商用人形机器人单台造价仍在30-100万元区间 |
| 场景适应有限 | 复杂、非结构化环境下的表现仍有差距 |
| 能耗问题 | 高性能运行时的续航仍是瓶颈 |
| 安全验证 | 在人类身边工作的安全性需要大量验证 |
七、未来展望:具身智能的下一个五年
展望未来,具身智能的发展可能遵循以下路径:
2026-2027年:工业场景规模化落地
工厂、仓库、物流中心将成为人形机器人最先规模应用的场景。成本将下降到10-20万元区间。
2028-2030年:服务场景初步渗透
酒店、餐厅、医院等服务场景将出现更多机器人身影。家用机器人仍以单功能为主。
2030年以后:技术收敛与成本下降
随着核心零部件的标准化和量产,机器人成本将大幅下降。2035年前后,或许能看到万元级的家用机器人。
结语
“闪电”用50分26秒跑完了21公里的半马赛道,这个成绩值得庆祝,但我们也要清醒地看到:机器人距离真正“跑进”日常生活,还有很长的路要走。
技术突破让人振奋,但商业落地需要的是耐心。在期待机器人早日走进千家万户的同时,我们或许可以把掌声先给那些在实验室和车间里日复一日攻关的工程师们——没有他们的付出,就没有“闪电”的这一程奔跑。
相关AI技术文章
本文参考资料:每日经济新闻(2026-04-20)、新浪科技、36氪
发表回复